Keďže lietadiel v dnešnej dobe lieta naozaj mnoho, pre zachovanie bezpečnosti a plynulosti letovej prevádzky je potrebné mať neustály prehľad o aktuálnej situácií vo vzdušnom priestore. V nasledujúcej sérií článkov si teda postupne bližšie priblížime jednotlivé technologické riešenia a možnosti sledovania lietadiel.
Primárna rádiolokácia – primárne prehľadové radary
V dnešnom článku sa bližšie pozrieme na spôsob primárnej rádiolokácie. História rádiolokácie vo vzdušnom priestore siaha až do roku 1927, kedy nemecký fyzik H.E. Hollman experimentálne otestoval správanie elektromagnetického žiarenia. Zistil, že vyslané žiarenie sa od pohybujúcich sa objektov odráža, čím inšpiroval ostatných vedcov k vývoju prvého rádiolokačného zariadenia. Takéto zariadenie bolo skonštruované v roku 1935, pričom v roku 1940 vzniklo pomenovanie systému: RADAR – Radio Detection and Ranging.
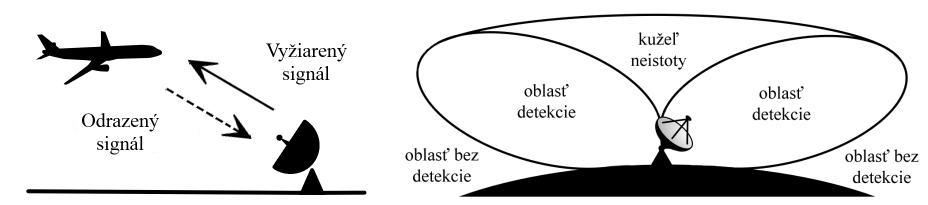
Od tej doby sa princíp činnosti primárnych radarových systémov prakticky veľmi nezmenil. Základom je vyslať do atmosféry elektromagnetické žiarenie (správnej frekvencie so správnym výkonom), ktoré sa od objektov vo vzdušnom priestore odrazí. Takýto odrazený signál sa prijme na zemskom povrchu a následne vyhodnotí, čím radar získa hľadanú polohu objektu. Pre čo najpresnejšiu detekciu lietadla vo vzdušnom priestore sa používajú špeciálne ladené anténne systémy, ktorých hlavnou výhodou je smerová vyžarovacia charkateristika – v jednom konkrétnom smere sú schopné prijať silnejšie aj slabšie signály a v ostatných smeroch nie. Aby bolo možné sledovať lietadlá v horizonte 360°, použitý anténny systém rotuje primeranou rýchlosťou tak, aby pokryl celú zamýšľanú oblasť. Štandardná rýchlosť rotácie antény je približne 4 – 15 otáčok za minútu, teda údaj o polohe lietadla je získavaný každých 4 – 15 sekúnd.

Anténny systém primárneho radaru. [LPS SR š.p.]
Takto získaná poloha lietadla bola v histórií veľmi dôležitá. Lietadiel vo vzdušnom priestore nebolo veľa a vzhľadom na princíp činnosti bolo možné detegovať akékoľvek objekty vo vzdušnom priestore. Primárne radary však v súčasnosti, špeciálne v armádnom sektore zastávajú dôležitú úlohu v protivzdušnej obrane, nakoľko sú schopné detegovať akýkoľvek letiaci cieľ – raketové a zbraňové systémy, alebo lietadlá s úmyselne vypnutými identifikačnými systémami na palube.
Špecifickou aplikáciou primárnych radarových systémov v armádnom sektore sú aj tzv. PAR radary (Precision Approach Radar), kedy daný radar sleduje lietadlo na priblížení nielen v horizontálnej, ale ja vertikálnej rovine. Príslušnému riadiacemu letovej prevádzky sa na radarovej obrazovke okrem smerovej a zostupovej roviny zobrazuje aj aktuálna poloha lietadla a podľa príkazov, ktoré dáva pilotovi v lietadle vlastne navádza lietadlo do správneho smeru a v správnom klesaní na pristátie.
V dnešnom civilnom svete však táto rádiolokačná technika, pri súčasnom objeme civilnej letovej prevádzky, zastáva len akúsi pomocnú/záložnú funkciu, pretože je jednoducho nedostačujúca. Dôvodov na to je hneď niekoľko:
– Primárny radar, okrem polohy, nedokáže poskytnúť iné údaje o lietadlách,
– Vďaka rotácií antény sa pri primárnych radaroch vyskytuje efekt „kužeľu neistoty, kde radar nedokáže detegovať žiadny objekt, resp. detegcia objektov je veľmi nepresná,
– Prevádzka primárnych radarov, vzhľadom na potrebu vyžiarenia elektromagnetického žiarenia vysokého výkonu, je pomerne náročná nielen na prevádzku, ale aj finančné zdroje.
Podľa použitej frekvencie, umiestnenia radaru a zamýšľaného použitia je potom možné rozlíšiť radary:
1. Radary pásma L (frekvencia 1-2GHz), ktoré sú určené ako prehľadové radary veľkého dosahu,
2. Radary pásma S (frekvencia 2-4GHz), ktoré sú určené ako meteorologické radary, resp. prehľadové radary stredného dosahu,
3. Radary pásma X (frekvencia 8-12GHz), ktoré sú určené ako meteorologické radary, resp. prehľadové radary malého dosahu s vysokou presnosťou.
Tak ako však bolo spomenuté, princíp činnosti primárnych radarov je využívaný aj pri meteorologických pozorovaniach. Podľa použitej frekvencie je totiž možné detegovať ľubovoľne veľké objekty vo vzdušnom priestore – primárne radary detegujúce zrážky. Takéto radary sú umiestňované nielen na zemskom povrchu, ale aj na palubách lietadiel – tzv. weather radar, ktorý pilotom na navigačnom displeji v kokpite zobrazuje intenzitu zrážok pred lietadlom. Z takto získaných údajov o súčasnej zrážkovej situácií vo vzdušnom priestore potom piloti oblietajú búrky, aby sme sa my, pasažieri, cítili komfortne a bezpečne 🙂 .

Uplatnenie primárnych radarov v kokpite lietadiel – weather radar.

V pozadí radom primárneho a sekundárneho radaru na letisku M.R. Štefánika (BTS/LZIB) v Bratislave.


