Dnešný systém prehľadovej radarovej infraštruktúry zabezpečuje riadiacim letovej prevádzky dostatočný počet informácií o lietadlách vo vzdušnom priestore. Má však svoje limity a preto sa stále viac do popredia dostávajú moderné technologické riešenia, akým je automatické závislé sledovanie. Automatické závislé sledovanie je však závislé od presnosti GNSS systémov a rôznych palubných systémov. Na spresnenie hľadaje polohy lietadiel bol preto vyvinutý ďalší systém – Multilaterácia.
Multilaterácia
Presnosť detegovanej polohy lietadla v zahustenom vzdušnom priestore je veľmi kritický údaj, ktorý dokáže výrazne ovplyvniť bezpečnosť vo vzdušnom priestore. Keďže množstvo sledovacích a prehľadových systémov je závislé na iných systémoch, v posledných rokoch pokračuje vývoj spresňujúceho systému získavania polohy lietadla – multilaterácia.
Princíp činnosti multilateračného prehľadového systému, podľa použitej technológie, pozostáva v neustálom monitorovaní a prijímaní signálov na frekvencií 1090 MHz. Systém zachytí všetky elektromagnetické signály – odpovede lietadiel na tejto frekvencií – odpovede sekundárneho radaru v móde A,C,S a odpovede automatického závislého sledovania, pričom ďalej s nimi pracuje. Systém dokáže vyhodnotiť za aký čas signál putoval atmosférou – zmeraním času od odoslania k prijatia správy a následne tento časový interval vyhodnotí a vypočíta pravdepodobnostnú hyperbolu.
Pravdepodobnostná hyperbola je hyperbolická krivka, na ktorej sa dané lietadlo s určitou pravdepodobnosťou nachádza. Pre správnu detekciu konkrétnej polohy lietadla je potom potrebné, aby systém pozostával z niekoľkých pozemných prijímačov. Každý z prijímača vypočíta pravdepodobnostnú hyperbolu, tie sa následne navzájom matematicky prekryjú a v priesečníku viacerých hyperbol sa nachádza hľadaná poloha lietadla, pričom pre detekciu 2D polohy lietadla sú potrebné minimálne 3 pozemné prijímače a pre detekciu 3D polohy lietadla sú potrebné minimálne 4 pozemné prijímače.
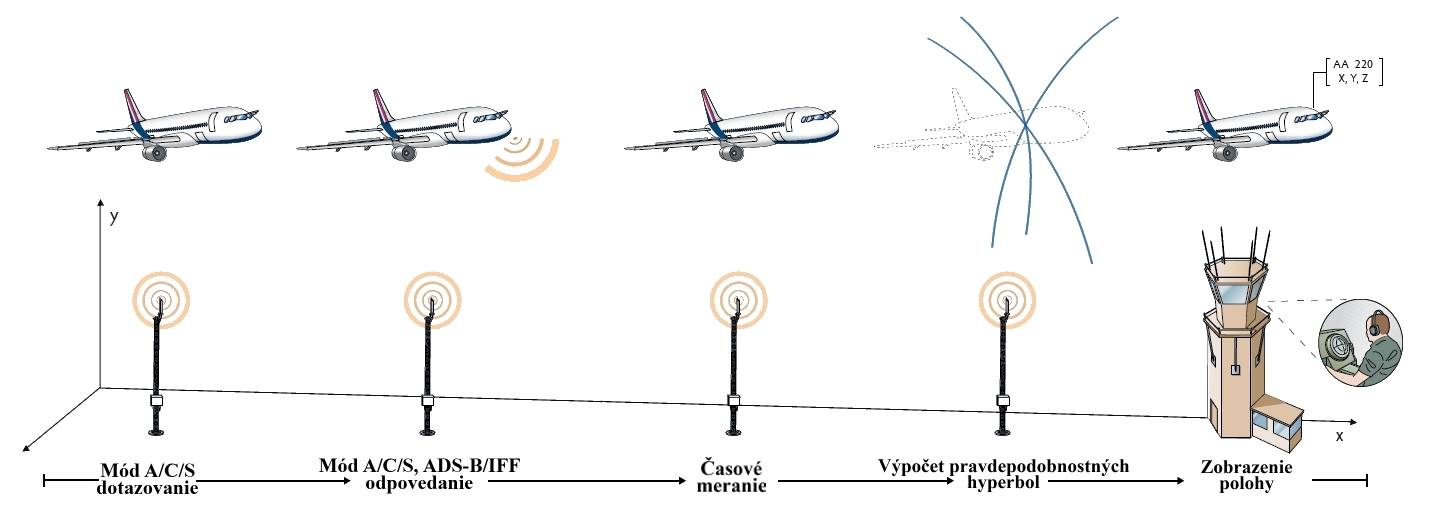
Znázornenie princípu činnosti multilaterácie. (Multilateration.com)
Podľa použitej technológie môže byť systém pasívny, alebo aktívny. Pasívny multilateračný systém pozostáva iba zo siete pozemých prijímačov a počítačových systémov. Pasívny multilateračný systém by sa mal budovať prevažne v oblastiach, kde je potrebné zabezpečiť väčšiu presnosť polohy lietadiel vo vzdušnom priestore, pričom je v oblasti dostaočný počet potrebných signálov z lietadiel.
No v niektorých výrazne členitých oblastiach, najmä pri letiskách v horskom teréne, je pre dostatočný počet dostupných signálov z lietadla potrebné do systému zabudovať aj jednoduchý dotazovač, čím dostávame aktívny multilateračný systém. V tom prípade dotazovač vysiela krátke dotazy, na ktoré reagujú len lietadlá v blízkom okolí. Dotazovačom sa zabezpečí dostatočný počet impulzov, ktoré systém môže spracovať a vyhodnotiť.

Porovnanie presností detekcie polohy lietadiel sekundárnym radarom a multilataračným systémom. (Multilataration.com)
Ďalej je možné multilateračný systém rozdeliť na dve základné kategórie a to podľa spôsobu jeho určenia na letiskovú multilateráciu a oblastnú multilateréciu.
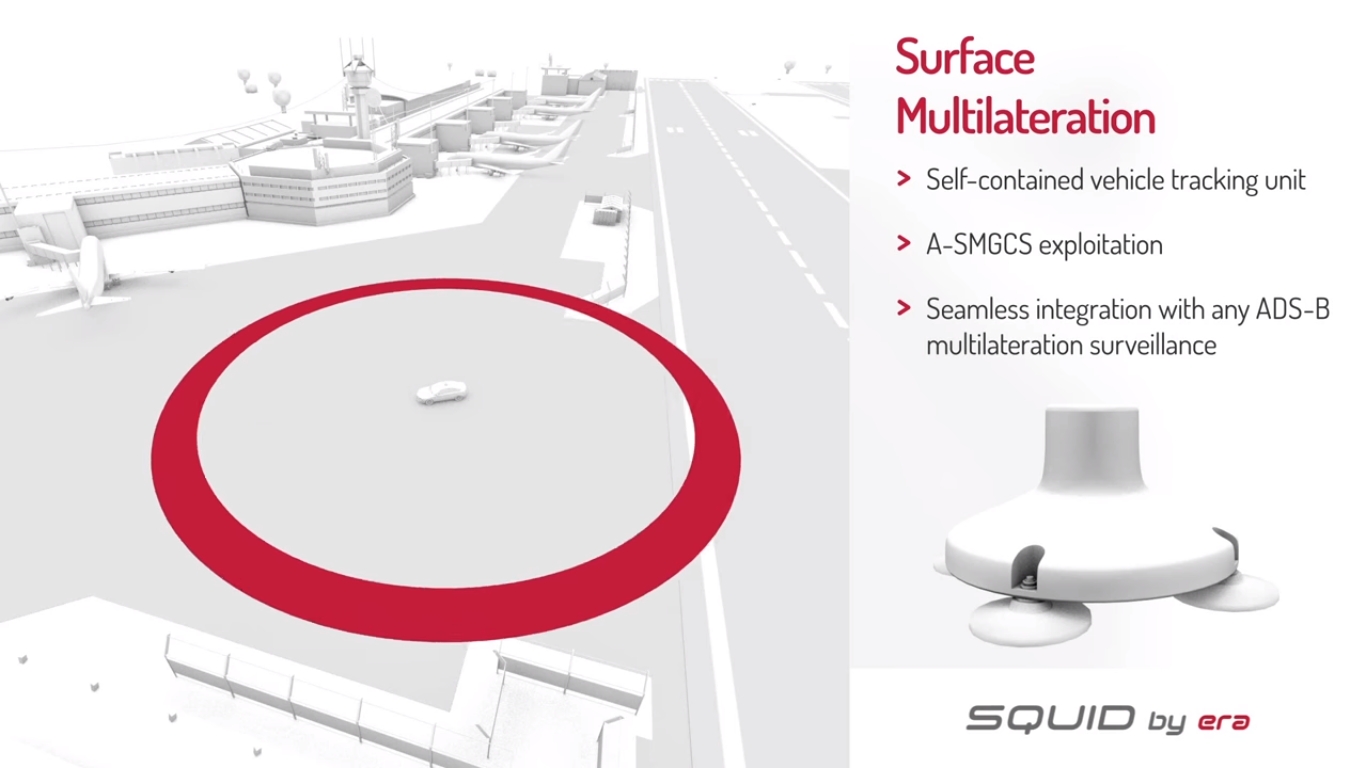
Letiskový multilateračný systém, tak ako z jeho názvu vyplýva, je veľmi presný multilateračný systém, ktorý sa buduje v bezprostrednej blízkosti letísk. Takýto systém slúži potom nielen na monitorovanie pohybu lietadiel po letisku a v jeho okolí, ale aj na monitorovanie pohybu letiskových a obslužných vozidiel. Systém je tak možné použiť ako veľmi presný monitorovací systém pozemnej aktivity všetkých pohybujúcich sa lietadiel a vozidiel po letiskovej ploche.

Squid – anténa systému letiskovej multilaterácie na letisku Ostrava – Mošnov LKMT/OSR, českého výrobcu ERA.
Oblastný multilateračný systém sa naopak používa na pokrytie rozsiahlych oblastí vzdušného priestoru. Systém v takomto prípade pozostáva z niekoľkých vzdialených pozemných prijímačov a niekoľkých spresňujúcich prijímačov, ktoré zabezpečujú sprespenenie detegovanej polohy lietadiel v rámci väčšieho celku vzdušného priestoru – napr. v rámci niektorého sektoru vzdušného priestoru štátu.
Názornú animáciu multilateračného systému od českej spoločnosti ERA si môžete pozrieť kliknutím na obrázok.
Výhodou použitia multilateračného systému v rámci prehľadových systémov je hlavne jeho pomerne veľká jednoduchosť a výrazná presnosť detegovanej polohy lietadiel. Pretože je systém jednoduchý, náklady na jeho vybudovanie a prevádzku sú taktiež menšie ako náklady na vybudovanie prijímačov a dotazovačov sekundárneho radaru. Medzi hlavné nevýhody systému je však možné zaradiť potrebu veľmi presného merania času medzi odoslaním a prijatím odpovede. Presnosť tohto merania totiž výrazne ovplyvňuje hyperbolickú krivku pravdepodobnej polohy lietadla. Rovnako sa ako negatívum ukazuje neschopnosť vylúčiť falošné a odrazené signály, ktoré systém zachytí a spracuje, najmä v horských oblastiach, kde môže v takom prípade poklesnúsť presnosť detegovanej polohy lietadla.

Výhľad z letiskovej riadiacej veže na letisku v Bratislave.
Verím, že naša séria článkov o aktuálne používaných technikách rádiolokácie lietadiel vo vzdušnom priestore Vám aspoň z časti priblížila danú problematiku. V prípade Vašich otázok nás určite neváhajte kontaktovať, radi Vám zodpovieme Vaše otázky. 🙂
Prečítajte si tiež:
Techniky prehľadovej rádiolokácie lietadiel vo vzdušnom priestore I.
Techniky prehľadovej rádiolokácie lietadiel vo vzdušnom priestore II.
Techniky prehľadovej rádiolokácie lietadiel vo vzdušnom priestore III.
Techniky prehľadovej rádiolokácie lietadiel vo vzdušnom priestore IV.


